Data-driven Computer Vision (CV) tasks are still limited
by the amount of labeled data. Recently, some semantic
NeRFs have been proposed to render and synthesize
novel-view semantic labels. Although current NeRF methods
achieve spatially consistent color and semantic rendering,
the capability of the geometrical representation is limited.
This problem is caused by the lack of global information
among rays in the traditional NeRFs since they are
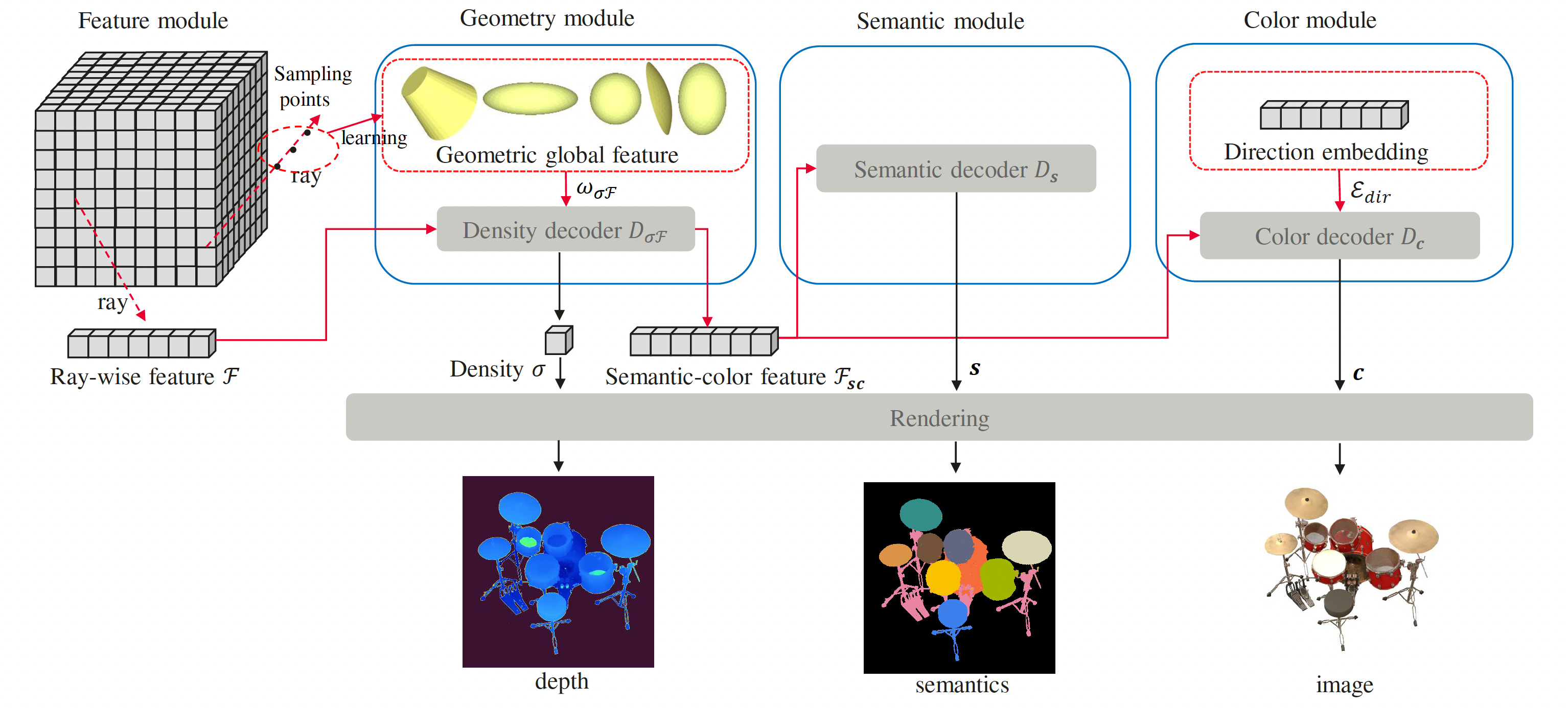
trained with independent directional rays. To address this
problem, we introduce the point-to-surface global feature
into NeRF to associate all rays, which enables the single
ray representation capability of global geometry. In particular,
the relative distance of each sampled ray point to the
learned global surfaces is calculated to weight the geometry
density and semantic-color feature. We also carefully
design the semantic loss and back-propagation function to
solve the problems of unbalanced samples and the disturbance
of implicit semantic field to geometric field. The experiments
validate the 3D scene annotation capability with
few feed labels. The quantification results show that our
method outperforms the state-of-the-art works in efficiency,
geometry, color and semantics on the public datasets. The
proposed method is also applied to multiple tasks, such
as indoor, outdoor, part segmentation labeling, texture rerendering
and robot simulation.